

131 Quadricoptère DJI FLAME WHEEL F450 avec GPS
PREAMBULE:
Mon quadricoptère F450 se pilote en mode 1 et n'est dans l'immédiat pas équipé de nacelle (GIMBAL) pour prise de photos ou de vidéos. Il a été acheté chez PATRICK MODELISME (Marseille)
Ma radiocommande est de marque FUTABA T10CP et mon récepteur Turnigy ORANGE RX compatible.
Il est équipé d'un GPS
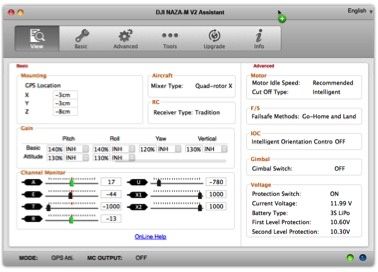
Le logiciel téléchargé pour la calibration est le NAZAM pour MAC "v2.20_installer.dmg"

Description
La Flame Wheel F450 est un châssis multi-rotors conçu pour le plaisir de tous les pilotes, débutants ou confirmés. Il est livré d'origine avec son électronique NAZA M V2 et son GPS qui permettra de faire en toute aisance des vols stationnaires, des translations, des roulements et bien d'autres encore!
Il pourra être utilisé pour la photographie aérienne, des vues à la première personne ou, tout simplement, pour le plaisir tant le confort de pilotage et la stabilité qu'il offre sont bluffants.
Le train d'atterrissage est fourni
Caractéristiques techniques
Poids du cadre: 282g
Empattement diagonal: 450mm
Poids pouvant être levé: 800g ~ 1600g
Hélices recommandées: 9,4 x 5 auto serrantes
Batterie recommandée: 3S ou 4S lipo
Motorisation


Quatre moteurs (2 CW + 2 CCW) et quatre controleurs ESC
La référence de ces nouveaux moteurs est la suivante: E305 2312E
Dimensions du stator: 23mm x 12mm - KV: 960 Tr/V
Les contrôleurs sont de type E420 LITE
Fréquence du signal: 30Hz ~ 450Hz
Accu 3S ou 4S
Hélices

Nouvelles hélices auto serrantes - Anti impacts 9,4 x5

Bras et cadre
Les bras de structure sont fabriqués avec des matériaux ultra résistants. Ils permettent, ainsi, d'offrir une résistance accrue en cas de crash!
La grande innovation réside dans le fait que le câblage vers la motorisation est intégrée dans le bras
Le cadre du F450 composé de deux plaques intrègre les circuits imprimés permettant de relier la totalité des composants électroniques et de les alimenter. Le câblage vers la batterie et les contrôleurs est ainsi plus sécurisé et surtout fiable!
L'architecture du cadre est optimisée permettant de dégager beaucoup d'espace pour que les composants y soient installés sans difficulté
ELECTRONIQUE
Présentation
Le système NAZA est une plateforme de contrôle multiaxes spécialement conçue aussi bien pour les pilotes amateurs que confirmés tant il vous procurera une stabilité extrême.
Il s'agit d'un module tout-en-un: gyroscope, accéléromètre et baromètre (pour la mesure d'altitude).
Il est compatible, par son système D-Bus, avec la norme S-BUS de multiplexage.
Il vous procurera une stabilité et maniabilité à toute épreuve qui vous émerveillera.
En utilisant l'accéléromètre et le gyroscope il pourra conserver sa position contre vents et marées.
De quoi est-il capable?
C'est tout d'abord un module de gestion pour nacelles.
En effet, le NAZA permettra de contrôler la plupart des nacelles photo (voir dans les produits complémentaires) offrant ainsi la possibilité de conserver un angle de vue déterminé (sur un axe que vous définirez) et cela même lorsque votre drone navigue dans n'importe quelle direction que ce soit.
- Il contrôle la tension générale de l'accumulateur et lorsque la tension est trop basse il se posera pour éviter tout incident.
- Le module NAZA permettra de maintenir une position déterminée, soit automatiquement soit manuellement. Le maintien d'altitude est extrêmement fiable grâce à l'utilisation d'un baromètre.
Nouveautés de la version V2
- Plus précis et stable
- Livré avec le module PMU
- Livré avec LED haute luminosité déportée
- Plug'N'Fly
- Connexion ultérieure possible avec IOSD
- Connexion ultérieure possible avec Caméra Zenmuse GOPRO DJI
- Support des quadro jusqu'à octo (9 types de multi-rotors)
- Support PPM, Futaba SBUS et multi voies standard
Fourni dans le kit:
- Drone F450 avec ses 4 bras, sa platine principale
- 2 paires d'hélices 9,4 x 5 auto serrantes
- 4 Moteurs Brushless E305 2312E 960kv
- 4 Contrôleurs E420 LITE
- Système électronique NAZA-M V2 et son GPS
- Train d'atterrissage
Notices téléchargeables sur le site DJI:
Notice du DJI F450
Notice du Naza-M V2
Logiciel de programmation du Naza-M V2
Nécessaire pour compléter le kit:
- Quelques heures pour le montage, un fer à souder, et du frein filet (Loctite bleu).
- Une radiocommande et récepteur 5 voies avec réglage des courses, 6 voies conseillées pour une nacelle ultérieure.
- Un accumulateur LiPo
- Chargeur LiPo
Comme toute description commerciale, celle-ci est flateuse.
Je signale que la plaque de base n'intègre pas la totalité des composants électroniques. Elle cache seulement un circuit imprimé somme toute sommaire qui relie électriquement la partie circuit de puissance depuis la batterie aux quatre contrôleurs des moteurs brushless.
En ce qui concerne la stabilité et les performances des vols, celle-ci résultera surtout d'un bon calibrage du module NAZA-M à l'aide du logiciel qu'il faut maîtriser, d'où l'intérêt de lire ce qui suit ainsi que les fichiers téléchargeables. En réalité rien d'insurmontable ni de très compliqué quand on sait tout.
De nombreuses vidéos présentes sur internet "Youtube" montrent comment disposer les éléments constitutif, effectuer quelques soudures étain, faire les branchements électriques et électroniques.
Je me suis inspiré des vidéos d' ARTHUR KONZE, très bien faites, expliquées en allemand et qui présentent étape par étape l'avancement du montage.
https://www.youtube.com/watch?v=OBBMPqyaDLE&list=PL8-u33E7q5tFhGQmpsrmsuSeQlE6ai2TL
Voici rappelés les branchements du circuit de commande sur l'unité principale NAZA-M

- D'un coté on raccordera les contrôleurs ESC des moteurs dans l'ordre M1 à M4, M1 étant le moteur avant droit, M2 le moteur avant gauche, M3 le moteur arrière gauche, M4 le moteur arrière droit comme c'est d'ailleurs figuré dans le logiciel de configuration NAZA-M.
- De l'autre seront effectués les raccordements au récepteur de radiocommande selon les modèles de radio concernés.
- A = Tangage, équivalent à la commande des ailerons d'un avion et nommé ROLL dans le logiciel
- E = ELEVATOR, roulis ou profondeur sur un avion, nommé PITCH dans le logiciel
- T = TURTLE, commande des moteurs, gaz
- R = RUDER, lacet, direction sur un avion, nommé YAW dans le logiciel
- U = voie de l'interrupteur (3 positions) de sélection du type de vol, c'est à dire GPS, ATTI et FAILSAFE
NOTA: Pour une radio FUTABA les voies standardisées sont les suivantes:
CH1 => A , CH2 => E, CH3 => T, CH4 => R
U sera raccordé à la voie affectée à l'interrupteur de sélection des différents types de vol (GPS, ATTI et FAILSAFE), le plus simple étant d'utiliser la voie CH5 affectée à un inter 3 positions

Pour un bon bricoleur, les points les plus délicats dans la préparation du quadricoptère ne sont pas son assemblage mécanique et électrique, mais toute la partie électronique destinée à donner vie à l'aéronef.
Trouver la documentation, si possible en français, à jour et bien faite m'a demandé pas mal de temps et c'est pourquoi j'ai édité les fichiers téléchargeables suivants.
Je remercie aussi PATRICK MODELISME de l'assistance qu'il m'a apportée.
Le guide de démarrage rapide en anglais
Les pages du logiciel NAZA-M traduites en français avec quelques explications
Les différents types de vol possibles en NAZA-M: GPS, ATTI, MANUEL, IOC et le FAILSAFE,
Voici comment je suis parvenu à calibrer correctement mon F450 pour un premier vol
La calibration du premier vol avec les 3 modes: GPS, ATTI et FAILSAFE mais sans IOC, ni nacelle pour rester simple
Mercredi 1er février 2017
Premiers décollages/atterrissage dans un pré dégagé d'obstacles.
Les conditions atmosphériques sont assez bonnes, le vent faible.
Je suis un peu fébrile, mais confiant pour avoir mis toutes les chances de mon coté.
Pour la première fois, après allumage de la radio, raccordement de l'accu lipo et une tentative de calibration du compas finalement mal faite, je peux constater que la LED reste à clignoter en vert, preuve que le GPS à détecté les 6 satellites.
Inter en position GPS, j'arme les moteurs qui se coupent faute d'avoir suffisament accéléré.
Remise en accélération lente pour éviter la coupure, puis au delà de mi gaz pour que le quadricoptère décolle.
L'aéronef s'élève doucement dans une position tout à fait stable. Quelques manoeuvres lentes vers l'avant à une dizaine de mètres de hauteur, avant d'enclencher le mode de vol FAILSAFE.
La LED passe de clignotement vert à clignotement orange tandis que le quadricoptère prend encore plus d'altitude, puis revient de façon inquiétante au dessus de moi. Je m'esquive, tout en surveillant et de constater que le quadricoptère fini par se poser à proximité de son emplacement de décollage.
Confiant de cet essai réussi, je réitère le décollage en testant timidement ses réactions à l'action sur manches. Celles-ci s'avèrent correctes. Je tourne le nez 1/4 vers la droite puis enclenche le retour FAILSAFE que j'ai calibré AT HOME plutôt que pose verticale sur place, l'autre option.
Le quadricoptère se pose sans encombre à 2 mètres près de son point de décollage, mais l'orientation du nez restera telle que piloté 1/4 de tour sur la droite. L'écart de position s'avère plus grand que ce à quoi je m'attendais.
Mon F450 posé, les gaz se coupent automatiquement.
Lors de ce second test, j'ai pu constater que dans le vent, les moteurs réagissent pour réguler la trajectoire.
Faute de pouvoir mesurer la charge résiduelle de l'accu après ces deux petits vols, et surtout me remettre de mes émotions, je préfère remettre à plus tard les prochains vols. Je prévois d'installer un témoin de charge et de programmer l'alarme de temps de vol sur ma radio. De plus, normalement en cas de tension insuffisante, le quadricoptère devrait automatiquement se poser, ce qui doit encore être testé.
Lundi 6 février 2017
J'ai effectué le 3ème décollage avec mon drône et commence à expérimenter les différents types de vol.
Le plus simple et le plus sécurisé étant le mode GPS, c'est celui que j'ai utilisé durant 3 minutes.
Dans ce type de vol, excepté la commande de gaz, dès que les manches sont relâchés et reviennent au neutre, le quadricoptère se remet bien à plat, sans dériver de sa localisation géographique.
J'ai ensuite atterri en utilisant le mode RETOUR AT HOME, où le drone monte d'abord en altitude à 20 mètres avant de revenir au point de décollage et se poser.
Mardi 7 février 2017
Avant de décoller balayer les 3 types de vol, puis s'assurer que la Led clignote correctement pour chacun d'eux.
La prise en main s'améliore, au second vol j'ai même posé sans passer par le mode "FAILSAFE retour at home" qui est une sécurité mais pas à proprement parler un mode de pilotage
A noter qu'il n'est pas évident de visualiser l'orientation du quadricoptère autour de son axe vertical. Une rampe d'éclairage à l'arrière faciliterait la visualisation.
Je n'ai pas encore testé le mode ATTI.
Je dois aussi revoir la calibration pour inclure le mode IOC, et réduire le domaine de vol, tant en distance qu'en altitude, en me contentant de 100m dans les deux directions.
Vendredi 17 et samedi 18 février 2017 au terrain de PALAYSON
Un vol dans du vent assez fort en mode GPS est confirmé, avec Retour At Home.
Le quadri était assez stable, mais avait tendance à pencher à gauche.
J'avais allumé la mini caméra, mais j'ai effacé les films en les téléchargeant sur l'ordinateur.
J'ai fait 3 vols d'environ 5 minutes, l'un au petit parking de l'ESTEREL, les deux autres dans le pré aux anes.
Malheureusement j'ai effacé les 4 vidéos en voulant les transférer sur le MAC.
Samedi 11 mars 2017 dans l'ESTEREL
J'ai fait 3 vols d'environ 5 minutes, l'un au petit parking de l'ESTEREL, les deux autres dans le pré aux anes.
Malheureusement j'ai effacé les 4 vidéos en voulant les transférer sur le MAC.
Lors du premier vol, je n'ai pas fait attention au sens du quadricoptère quand je l'ai posé sur la table. La caméra est montée vers l'arrière, ce que je n'avais plus en tête et les commandes étaient de ce fait inversées, ce qui l'a conduit rapidement au tapis, mais rien de cassé.
Ensuite, j'ai eu des doutes sur la capture des satellites. Aussi en raison de la présence de promeneurs j'ai préférer revenir au pré.
Au second vol, j'ai testé le Retour At Home puis j'ai re décollé et le vol a duré au point que j'ai posé du fait que le régime des moteurs ne permettait plus de grimper. La lipo était à 4% en fin de vol.
Pour le troisième vol, j'ai ménagé l'accu en volant moins longtemps et je n'ai pas utilisé le retour at home.
J'ai commencé à prendre confiance dans le pilotage et commence à évoluer dans des similis huit à plat.
Je crains beaucoup moins les erreurs de pilotage qu'en hélico et de ce fait vole plus haut.
Le pilotage demande une attention constante mais n'est pas insurmontable.
Dimanche 19 mars 2017 au terrain de PALAYSON
Un vol tranquille sur le coup de 13 heures avant de remballer pour avoir oublié mes autres accus lipo.
Mercredi 5 avril 2017 au terrain de PALAYSON
Peu de vent, puis plus de vent et personne au terrain à 15h45
C'est l'occasion d'effectuer le premier vol pour mes drones EACHINE RACER 250 et F450 sans GPS
Il a bien volé, bien qu'un peu plus vif que mon DJI F450 GPS. Plus petit on a vite fait de le perdre de vue et il est donc indispensable de s'aider de la rampe LED d'éclairage arrière. Pourtant je ne suis pas parvenu à commuter les couleurs en vol. Étant seul je n'ai pas pu tester le FPV.
Non assisté du GPS, avec une carte contrôleur CCD comme mon EACHINE RACER 250 et utilisant la radiocommande de celui-ci, le vol est plus délicat, en particulier dans la gestion de l'altitude qu'il perd très vite si on abaisse les gaz. Sans repère lumineux contrairement à mes deux autres quadricoptères, j'en ai perdu le contrôle et terminé au sol assez loin de la zone de vol que je me suis fixée. Tombé en flèche, sur le dos, je n'ai cassé que l'hélice arrière droite.
Ç'est presque de la routine en vol lent pour m'assurer de ne rien casser, mais il reste encore beaucoup de progrès à faire pour piloter rapidement sans hésiter. Par précaution, j'ai enclenché une fois le retour GPS, aussi pour me convaincre qu'il fonctionne bien.
VENDREDI 21 AVRIL 2017
Changement d'émetteur, ma radio FUTABA T10CP étant en panne
· DJI F450 GPS avec SG14 et vol N°21
C'est la première fois que je vole un modèle avec cette émetteur.
Premier point, il a fallu binder l'émetteur avec le quadricoptère.
Chose faite, je rencontre quelques difficultés et il ne semble pas prendre en compte les satellites.
Ce n'est que lorsque l'inter G est en position milieu que je parviens à armer les moteurs et décoller.
Après tests en vol, le quadri peut-être mis en mode "Retour At Home" soit inter en bas, ce qui est normalement souhaité, mais aussi en mettant l'inter basculé en haut, ce qui n'est pas ce que je souhaite, car dans cette position je devrais pouvoir le piloter en mode "GPS"
Le problème a été réglé en passant le débattement de la voie 5 correspondant à l'inter G de 60% à 80%
MARDI 9 MAI 2017
DJI F450 GPS avec émetteur SG14 pour les vols N°22 et 23
Deux vols avec ma SG14 et test du Retour At Home.
Je commence à piloter avec une certaine aisance en mode GPS et suis venu poser sur une table de montage.
MODIFICATIONS: Afficher le temps de vol et activer l'alerte à 7 minutes
MARDI 16 MAI 2017
DJI F450 GPS avec émetteur SG14 pour le vol N°25 et 26
Deux vols supplémentaire. J'ai voulu tester le retour vidéo avec le masque et il a fallu retourner la caméra, les images étant inversées du fait que mon module FPV démontable est monté tête en bas.
Une rupture du retour d'image s'est produite, dont il faut déterminer l'origine. Accu trop faible par exemple.
Vérifier s'il est possible d'alimenter l'émetteur depuis le 12v ou la NAZA-M
Regarder aussi, bien que le temps de vol de 7 minutes déclenche une alarme, comment ajuster le beeper du contrôle de tension de l'accu lipo.
JEUDI 25 MAI 2017
DJI F450 GPS avec émetteur SG14 pour les vol N°26 et 27
450 GPS avec émetteur SG14 pour les vol N°26 et 27
Le programme prévoyait de tester le GOOGLE masque en FPV, mais impossible d'avoir l'image à l'écran.
Ce seront deux vols de démonstration cool où LUDO prendra les commandes en main quelques temps avant de revenir At Home.
MAINTENANCE:
Recharger les deux accus lipo du F450
Dépanner le FPV
SAMEDI 3 JUIN 2017
· DJI F450 GPS avec émetteur SG14 pour les vol N°28 et 29
Ce seront deux vols pris en main par MARIUS pour lui présenter les possibilité de mon quadricoptère.
Meilleur pilote que moi, il volera aussi à vue avec son VORTEX racer.
MERCREDI 5 JUILLET 2017
· DJI F450 GPS avec émetteur SG14 pour les vols N°35 à 38
Changement de secteur pour aller faire quelques vols de drône dans un endroit de l'ESTEREL au ciel dégagé plus sympathique.
Cette fois je commence vraiment à l'avoir en main et je voulais filmer depuis le drône, mais l'accu de ma mini caméra était déchargé.
AMÉLIORATIONS:
Prévoir un câble USB pour le rechargement depuis la prise allume cigare de ma voiture.
Recharger les accus
SAMEDI 8 JUILLET 2017
DJI F450 GPS avec émetteur SG14 pour les vols N°39 à 43
Grosse chaleur et peu de vent, je suis allé au MACRF, mais il n'y avait personne.
Puis je suis allé faire un petit film dans l'ESTEREL à la Colle Douce
VENDREDI 5 JANVIER 2018
QUADRICOPTERE F450 GPS – vols 85 à 92
Sept vols au Gratadis. A noter que deux accus de mes accus lipos arrivent en fin de vie, l'un n'a pas permis de décoller, l'autre après décollage et une petite minute de vol à conduit au crash du quadri, sans dommage heureusement malgré un décrochage assez rude.
VENDREDI 11 MAI 2018
Début 2016, j'avais monté un second F450, avec contrôleur de vol CC3D, sans GPS ni train d'atterrissage, qui a bien volé avec les deux récepteurs différents suivants:
* Première configuration AHFSD 2A avec récepteur TGY-i6 et radio émetteur TGY i6 (utilisant donc l'émetteur de mon EACHINE 250)
* Seconde configuration FASST actuellement avec récepteur Orange RX et radiocommande FUTABA T10CP ou SG14 pour voler avec la même radio que mon F450 GPS.
PROJET EN COURS
Actuellement je tente de dépanner quatre X8 IRDRONE, dont on m'a fait cadeau, ceux-ci n'ayant jamais pu décoller correctement.
Je dois:
- Les transformer pour pouvoir les piloter en mode 1, alors qu'ils étaient en mode 2
- Paramétrer le contrôleur de type FLYING3D avec S8_assistant v1.22
- Voir pourquoi ces quadricoptères manquent de puissance pour voler malgré de bons accus lipo
SAMEDI 12 MAI 2018
QUADRICOPTERE F450 n° 2 sans GPS
J'ai remplacé le récepteur TGY-i6 par un récepteur orange RX et refait la calibration avec LIBREPILOT pour utiliser ma radio T14SG, plutôt que ma radio EACHINEi6.
Le décollage du quadricoptère présente un défaut perturbant. Aux premières tentatives l' arrière gauche reste comme accroché au sol. J'ai d'ailleurs changé de point de décollage et c'est resté identique. Une fois passé ce déséquilibre gaz à fond, il vole correctement, bien que sensible à la commande de gaz. Contrairement au n° 1, il faut constamment le surveiller et les commandes sont un peu plus réactives.
Il faut peut-être lui refaire la calibration des moteurs pour laquelle j'avais un doute lorsque j'ai procédé. Je ne maitrise pas complètement toutes les options de LIBREPILOT et me contente d'utiliser les deux assistants. En phase 1 j'ai déclaré F450 pour les réglages, mais je ne sais pas quelles sont les valeurs appliquées sur les différents axes.

Émetteur et caméra démontables pour FPV se fixant par accroche velcro sous les quadricoptères


/image%2F0947641%2F20251016%2Fob_5c8d32_251015-alrm5-les-degats-du-crash.JPG)
/image%2F0947641%2F20220223%2Fob_f91b2f_161015-cita-interieur-cockpit-2.jpg)
/image%2F0947641%2F20180513%2Fob_edfc3f_emetteur-fx799t-et-camera-4.jpg)
/http%3A%2F%2Fi.ytimg.com%2Fvi%2F3_jIZJcbkZM%2Fhqdefault.jpg)
